
Educational event for robotics technologies
 Pacepacker Services is inviting anyone working in handling foods or packaging goods to join them for an educational event on 17 June to see a wide range of pick and place robots in action. Hosted at the company’s Essex facility, the event will highlight six different robots, including food grade systems, in real-world applications.
Pacepacker Services is inviting anyone working in handling foods or packaging goods to join them for an educational event on 17 June to see a wide range of pick and place robots in action. Hosted at the company’s Essex facility, the event will highlight six different robots, including food grade systems, in real-world applications.
Including the latest robots from FANUC and Festo, the event will showcase three main robot types: Cartesian, delta-style and articulated arm. Visitors will be able to compare the three types of robot and their handling skills, plus hear the decision making process Pacepacker takes to effectively select the right robot for an application.
Typical application scenarios you’ll see on the day include:
- Packs of noodles will be collated vertically into a retail tray using a FANUC M-710 articulated arm robot
- Festo’s Cartesian system will pick blueberry punnets in layers before placing them into retail trays
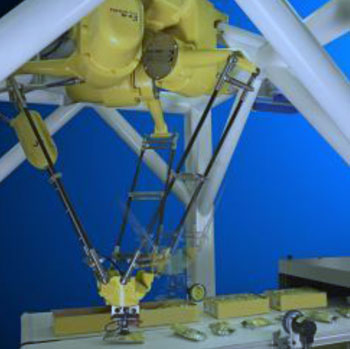
- FANUC’s IP69k certified M2 delta robot will demonstrate high speed picking
- Parsnips will be picked and placed into a cutter using FANUC’s LR Mate articulated robot arm with vision system
- Boxes of crisps being palletised by FANUC’s new M410ic robot
- Pacepacker’s FlexaPac system will collate and load netted fruits into retail trays
The automation systems will demonstrate high levels of efficiency, rapid throughput and incredible repeatable accuracies which curtail waste. As well as rubbing shoulders with food manufacturers attending the open day, you’ll will have the chance to question leading OEMs supporting the event including: Aetna, UPM Conveyors, FANUC, Dorney Labellers, Loma Systems, Festo, Vuototechnica as well as Pacepacker.
Visit the Pacepacker Services website for more information.
See all stories from Pacepacker Services












