
Robot gripper based on the human hand
 A new design of robot gripper was one of the highlights of the Festo stand at this year’s PPMA show. The MultiChoiceGripper is a flexible gripping concept that offers variable gripping based on the human hand.
A new design of robot gripper was one of the highlights of the Festo stand at this year’s PPMA show. The MultiChoiceGripper is a flexible gripping concept that offers variable gripping based on the human hand.
Pictured: Festo’s MultiChoiceGripper robot gripper picks up a ball using the centric grip. The form-fitting Fin Ray fingers on the robot gripper adapt to the ball’s shape, exerting less force than a conventional force-fitting robot gripper.
Product manager Steve Sands explains: “To cope with the complexity of parts to be handled, shape, mass, surface, fragility, etc, there are countless corresponding robot gripper designs. The Festo MultiChoiceGripper offers a unique combination of different grip types with flexible, adaptive gripping fingers. Its fingers can be internally switched from parallel (so called 2 finger robot gripper) or centric (3 finger robot gripper) configuration.”
A development within the Festo Bionic Learning Network, the benefits of developing a robot gripper solution that begins to emulate the versatility of the human hand are clear. The MultiChoiceGripper robot gripper combines two development fields, adaptive finger technology using Fin Ray structures and a clever mechanical linkage that changes the position of the fingers from ‘opposing’ to ‘surrounding’.
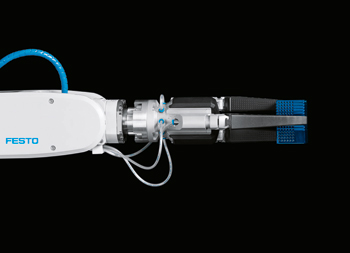 Pictured: the MultiChoiceGripper robot gripper uses the principle of the opposable thumb for a parallel grip.
Pictured: the MultiChoiceGripper robot gripper uses the principle of the opposable thumb for a parallel grip.
The changeover is enabled by two rotatable slots in the base of the robot gripper, which are arranged either around a central point or opposite the third finger. This is inspired by the human hand with its opposable thumb, which can be rotated by 130 degrees in relation to the other fingers. Depending on requirements, between two and six finger elements can be fitted to the MultiChoiceGripper robot gripper. Besides the Fin Ray fingers, two other types of fingers can be attached to the robot gripper.
Due to the adaptive fingers with a Fin Ray structure, the MultiChoiceGripper is not only variable in terms of the direction of grip as the fingers themselves can adapt to a wide variety of shapes. The robot gripper can therefore grip differently shaped and also very sensitive objects without additional sensor or control technology. The adaptive Fin Ray-Fingers on the robot gripper were designed in 2009 for the bionic FinGripper and have been continually developed ever since. For instance, since 2014 they have been made of food-compliant polyurethane, which means they can be applied within washdown environments in the food industry.
Sands concludes: “Future applications for the MultiChoiceGripper are widespread in assembly and robotic tasks. Until now, gripping multiple parts has required either time wasting tool changing, weight increasing multiple heads or even multiple handling arms.”
Visit the Festo website for more information on the robot gripper technology.
See all stories for Festo












