
Robot gripping strategies and selection process
 Robotiq has published a blog post ‘End Effector Gripping Strategies’ that presents numerous strategies that the company’s engineers have seen, and how a gripper can be best used in different applications. The blog post is supplemented with a 12-page downloadable eBook, ‘How to choose the right end effector for your application’.
Robotiq has published a blog post ‘End Effector Gripping Strategies’ that presents numerous strategies that the company’s engineers have seen, and how a gripper can be best used in different applications. The blog post is supplemented with a 12-page downloadable eBook, ‘How to choose the right end effector for your application’.
In particular, the blog post discusses the different strategies and the selection of appropriate robotic grippers for cylindrical, large and small objects.
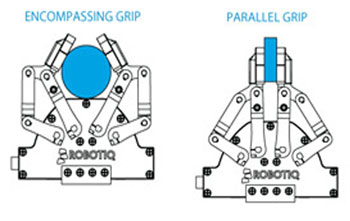
Towards the end of the blog post, the author outlines how the Robotiq adaptive gripper is popular with many types of industrial application because of its five-linkage mechanism that enables it to adapt to different objects’ shapes – as well as applications for which the five-link adaptability is not required, typically where parallel gripping is called for. To keep the fingers parallel, it is simply a matter of converting the five-link mechanism has to a four-link mechanism.
The detailed eBook provides more in-depth discussions of servo electric grippers (adaptive robotic grippers), pneumatic grippers, suction cups, electromagnetic grippers and permanent-magnet grippers, robotic tools for tasks such as welding and painting, and custom robotic end-of-arm tooling (EOAT). Advice is provided on how to choose the optimum gripper, and how to consider costs as part of the selection process.
Visit the Robotiq website for more information.
See all stories for Robotiq












