
Pilz offers modular system for safe robotics
 Safety aspects in robotic applications must always be considered on an individual basis and the appropriate safety solution implemented for each one. Safe sensor technology has a key role to play, but the experts at Pilz argue a modular approach is required in order to satisfy all applications with regard to safety.
Safety aspects in robotic applications must always be considered on an individual basis and the appropriate safety solution implemented for each one. Safe sensor technology has a key role to play, but the experts at Pilz argue a modular approach is required in order to satisfy all applications with regard to safety.
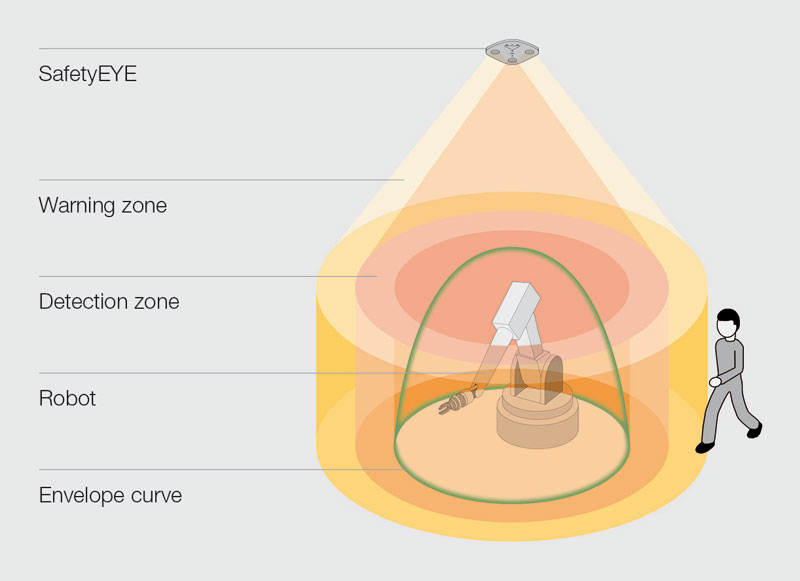
Pictured right: The safe three-dimensional system detects objects than encroach into warning and detection zones, which can be freely defined
Many of today’s applications that use robots have a very high level of automation. Human intervention into the production process is always undesirable. To guarantee safety and availability in such applications, plant and machinery are enclosed by mechanical guards. Generally speaking, the robot cell only needs to be accessed for service purposes. Safety gates are suitable for this type of access, although they must be safeguarded using safety gate sensors. If a safety gate is opened, the sensor detects this and generates a shutdown signal for the safe machine control system.
A variety of actuation principles and designs are used, depending on the requirement, installation and application-based boundary conditions. Non-contact, safe magnetic sensors represent a very economical solution for concealed installation, while safe RFID-based sensors such as the Pilz PSENcode safety switch enable maximum freedom during assembly and guarantee the greatest possible manipulation protection.
If safeguards need to be positioned close to a hazardous movement, when space is at a premium for example, then there is a risk from a hazardous overrun. In this case it is absolutely essential to use a safe guard locking device. Mechanical guard locking devices with spring interlock, such as the PSENmech, or integrated safety gate systems such as PSENsgate and PSENslock can perform these tasks.

Pictured left: Several virtual warning or detection zones can be arranged around the object to be monitored using the SafetyEye configurator
There is a wide range of unit types for all these technical sensor principles, so that almost every conceivable monitoring scenario can be implemented. For example, coded safety switches PSENcode from Pilz are used in areas of a robot-assisted car body plant; these can monitor up to three positions with just one sensor. Application areas in this case are the interfaces between man and robot, where manual access is also required to load and unload metal parts from robot cells enclosed by guards, for example.
With robot applications that require human control, insertion of parts or reworking, for example, electrosensitive protective equipment such as safety light curtains are often used to provide access protection. It may also be necessary to fit protection against encroachment behind the protected area in the form of vertically installed safety light curtains or a safety laser scanner. In many cases safety mats are the preferred choice, if the optical systems experience availability problems due to process-related boundary conditions such as dust, smoke, mist or steam, for example.
Human-robot collaboration is a whole new field. In an ideal scenario, man and robot will share the same workspace. These new application fields create synergies and therefore productivity benefits by combining the strengths and benefits of the machine – such as reliability, durability and repetition accuracy – with human strengths such as dexterity and flexibility. With this type of human-robot collaboration, the workspaces of the human and robot overlap in both space and time.
Collaborative robot safety considerations
Human-robot collaborations, particularly in the service robot sector, are a good example: robots with low payloads are generally used here, for pick and place applications for example. Every effort is made to implement the safety of the application through safety components and safety functions in or on the robot. For example, safe motion functions in the robot are combined with close-range sensors, with integrated torque monitoring in the robot or with tactile sensor technology around the robot. With this type of robot application, the movements are generally much slower than in fully automated applications.
When human-robot collaborations are used with robots with larger payloads, the safety concepts detailed above are pushed to their limits, and other concepts are called for. For example, it must be possible to distinguish whether a person is within the potential action radius of a hazardous movement (warning zone) or has already accessed a zone with an increased safety requirement (detection zone). Ideally it must be possible to adjust these zones dynamically and to track the safely monitored movements of the machine or robot, for example.
 New camera-based processes, such as those provided by the Pilz SafetyEye 3D camera system for safe zone monitoring, are capable of monitoring protected fields and detection zones safely in several dimensions. Thanks to their 3D operating principle, such sensor systems open up new possibilities for the design of applications. What’s more, detection zone arrangements can be re-adjusted at each step of the process.
New camera-based processes, such as those provided by the Pilz SafetyEye 3D camera system for safe zone monitoring, are capable of monitoring protected fields and detection zones safely in several dimensions. Thanks to their 3D operating principle, such sensor systems open up new possibilities for the design of applications. What’s more, detection zone arrangements can be re-adjusted at each step of the process.
Further developments in this field are dependent on the requirements of future applications: by combining a safe robot with a safe 3D camera system with better communication, a variety of strictly separate process steps can be merged and optimised. The safe robot knows its safe position, its safe speed and its safe direction of movement; the safe camera system knows the position of objects (people) around the robot’s operating range. Instead of a rigid shutdown, in future the whole system can react much more flexibly, avoid unnecessary downtimes and so increase plant productivity.
The proportion of human-robot collaborations will definitely rise, but growth will depend heavily on innovations in sensor technology and the robotics environment. Even in the future there will probably not be one safe robot or one safe sensor technology to cover all potential application cases with regard to safety. That’s why a modular system is needed that comprises a variety of technologies, from which users can choose the appropriate tool.
Each robot application requires a separate safety-related assessment. Ultimately a safe human-robot collaborative application is the result of several factors: interplay between normative framework conditions and a complex risk analysis on this basis, selection of a robot with the relevant safety functions, selection of appropriate, additional safety components and finally, validation through a systems integrator.
Pilz provides support with a services portfolio that’s tailored to the individual life phases of a robot system: from process analysis to risk assessment and CE marking. A special training package on robot safety completes the range of services.
Visit the Pilz Website for more information
See all stories for Pilz












