
KUKA mobile robot in factory logistics research
 A KUKA mobile robot unit is being used for the first time in the UK to help a group of engineers devise new ways of using automation on the factory floor. Students from Birmingham and Loughborough Universities together with researchers at Coventry’s Manufacturing Technology Centre (MTC) have joined forces for a European robotics competition organised by the EuRoc Consortium.
A KUKA mobile robot unit is being used for the first time in the UK to help a group of engineers devise new ways of using automation on the factory floor. Students from Birmingham and Loughborough Universities together with researchers at Coventry’s Manufacturing Technology Centre (MTC) have joined forces for a European robotics competition organised by the EuRoc Consortium.
The team’s task is to utilise the FlexFELLOW mobile robot unit, supplied by KUKA Systems UK, as part of an autonomous robotic system that can solve a series of shop floor logistics and manipulation challenges. The contest’s aim is to further exploit human-robot collaboration technology so that advanced manufacturing processes and applications can be developed for European industry.
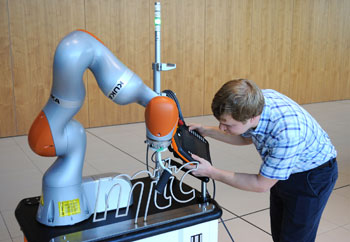
KUKA’s new FlexFELLOW, which comprises a lightweight, streamlined robot arm mounted on a compact, portable workstation, was chosen for the challenge as it’s specially designed to allow users to share the same workspace without safety guards. It has integrated, sensitive torque sensors on all 7 axes, which not only ensure a range of safety functions such as safe collision and force detection, but also mean the operator can influence and control the sequence of an application just by touching the robot.
“We’re solving this challenge by working together in a series of code camps at the host site in Germany as well as here at the MTC, which is where our partnership with KUKA Systems UK has been key,” explained Matt Rayment, MTC senior automation programme manager. “They have been able to support the team by providing the FlexFELLOW mobile robot unit so that we’re able to test code, make examples and conduct trial runs.”
Visit the KUKA Systems website for more information.
See all stories for KUKA Systems












