
RARUK highlights robots at Advanced Engineering
 As a Universal Robot Preferred Distributor, RARUK Automation provides customers with not only a higher level of technical support but also priority access to Universal Robot resources such as applications expertise. At Advanced Engineering 2017, visitors will be able to take advantage of this know-how and learn how Universal Robots are the ideal basis for cost-effective production solutions that enable humans and robots to work collaboratively.
As a Universal Robot Preferred Distributor, RARUK Automation provides customers with not only a higher level of technical support but also priority access to Universal Robot resources such as applications expertise. At Advanced Engineering 2017, visitors will be able to take advantage of this know-how and learn how Universal Robots are the ideal basis for cost-effective production solutions that enable humans and robots to work collaboratively.
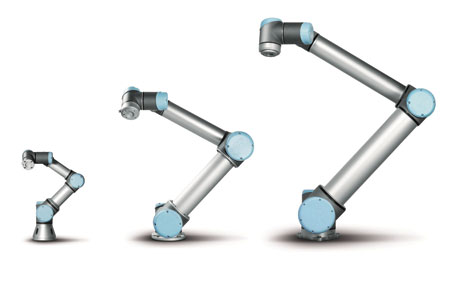
There are now three flexible and lightweight 6-axis robot arms in the Universal Robot range from RARUK Automation. Each can be used for a wide range of applications and are categorised according to their payload limits. The models also have reach, weight and footprint differences. The smallest and most recent addition is the table top UR3. It is extremely compact and virtually noiseless with a footprint of just 118mm. It weighs only 11kg but has a payload of 3kg and, in common with other Universal Robots, it has ±360 degree rotation on all wrist joints and infinite rotation on the end joint. Additional features include a patented safety system with 15 adjustable safety functions, a wide range of I/O ports, standard communication protocols for easy integration and programming via a 12in touch screen.
One of the most recent additions the range of accessories for the Universal Robots is YouRing, a smart programmable collar that gives visual and audible information on robot status. Wireless connectivity and the URCaps plug-in that is supplied with the YouRing makes this neat and clever device easy to install; URCaps is the accessory platform that enables full integration into Polyscope, the UR GUI for robot programming and operation. YouRing can then be freely programmed to meet the needs of the application and operator.
Visit the RARUK Automation website for more information
See all stories for RARUK Automation












