
Miniature inductives improve cobot performance
 Contrinex’s tiny Ø3mm inductive proximity sensors cram high levels of performance into the smallest of packages. This combination of small size and big performance is ideal to verify the presence of interchangeable end-of-arm tooling on small robots.
Contrinex’s tiny Ø3mm inductive proximity sensors cram high levels of performance into the smallest of packages. This combination of small size and big performance is ideal to verify the presence of interchangeable end-of-arm tooling on small robots.
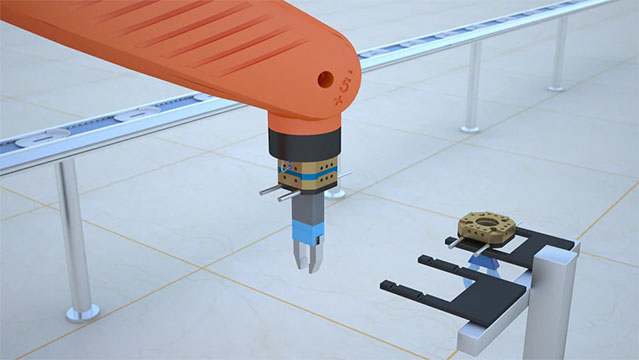
Small industrial robots and cobots (collaborative robots) are increasingly being used for material handling tasks like machine tending and moving parts from one operation to another, or between conveyors. To increase their flexibility and capability, interchangeable end-of-arm tooling or end-effectors, such as a variety of grippers and vacuum lifters are used to enable the robot to better handle different pieces or perform different tasks.
In a flexible manufacturing environment, to maximise machine availability, this change of tooling needs to be automated. The robot itself positions and disengages the old tooling and selects and engages the new end-of-arm tooling or gripper from a storage rack.
The small size and light weight of Contrinex’s tiny Ø3mm x 22mm long inductive proximity sensors, their 1mm sensing distance, and their being able to be flush mounted (embedded) in steel, makes them ideal for detecting the presence of a tool carrier and to sense the position of the locking mechanism.
For one particular customer, tool changeover systems are commonplace for large robots and now rapid tool changeover systems are available to improve the productivity of small robots. The robot’s capabilities and flexibility are further enhanced by a rapid tool changeover system, which allows a change between end-effectors within a single manufacturing cycle, rather than just between batches.
The tool changer has an annular ring of ball bearings that engages with a circular groove on the inside of the tool carrier. A retractable plunger, moving axially inside the changer and the carrier, locks the balls, and thus the carrier, in place. The correct engagement and locking are essential for safe operation, especially if the tooling and load are heavy or moving quickly.
To ensure the reliable operation of the robot, a highly reliable sensor-based system was sought to verify the presence of a tool carrier during the final stage of the attachment and to monitor the position of the plunger. The correct engagement and locking or unlocking and disengagement are therefore ensured by the sensor before the next process can be commenced.
The challenge of making automated tool-change systems affordable for use on small robots is that they must also maintain their high reliability, whilst occupying a small physical envelope.
Contrinex’s smallest inductive proximity sensor, the MiniMini, has a Ø3mm diameter and is only 22mm long – Its 1mm sensing range, robust V2A stainless-steel housing and resistance to vibration and mechanical shock made it ideal for this application. During a change of end-effectors, a single sensor, fitted axially in the centre of the tool changer on the arm, detects the presence of the tool carrier and inhibits the locking cycle until the engagement is fully complete.
Two more sensors are embedded one above the other, axially into the side of the tool changer, on the end of the arm. They sense the position of the plunger to confirm a locked or unlocked state, to ensure the robot’s sequence commences correctly.
Contrinex’s inductive proximity sensors provide a low-cost fit-and-forget solution. The version with an M8 connector on a short 20cm cable facilitates a quick change should there be damage to the tooling and sensor. The sensor including the M8 connector and cable weighs only 15g, less than double the weight of a £1 coin, it has a similar thickness, and shorter than the coin’s diameter.
Visit the Plus Automation website for more information on Contrinex sensors
See all stories for Plus Automation












