
The basics of 3D vision – and the impact of AI
 Paul Wilson, managing director of Scorpion Vision, explores the fundamental concepts of 3D Machine Vision, including stereo vision, point clouds, pixel displacement, depth perception, and height measurement.
Paul Wilson, managing director of Scorpion Vision, explores the fundamental concepts of 3D Machine Vision, including stereo vision, point clouds, pixel displacement, depth perception, and height measurement.
3D Machine Vision is a technology that enables machines to perceive and interpret three-dimensional data from the real world. It combines various imaging techniques and processing algorithms to create a comprehensive representation of an object’s shape, size, and position in space, allowing machines to perform complex tasks with increased accuracy and efficiency.
3D Machine Vision plays a crucial role in modern industrial applications, including automated inspection, robotics, and quality control. By providing detailed and accurate information about an object’s geometry, 3D vision systems can enhance production processes, reduce errors, and ensure the highest level of product quality. Moreover, these systems contribute to increased safety in manufacturing environments by enabling robots to collaborate with humans more effectively.
Stereo vision
Stereo vision, also known as stereoscopic vision, is a technique used in 3D Machine Vision to capture depth information from a scene. It works by simulating human binocular vision, where two cameras, placed at a certain distance apart, capture images from slightly different perspectives. By analysing the disparities between these images, a 3D model can be generated, providing valuable depth information.
The stereo baseline is the distance between the two cameras used in stereo vision systems. This distance plays a critical role in determining the system’s depth perception capabilities. A larger baseline results in greater disparities between the captured images, providing more accurate depth information. However, increasing the baseline also increases the complexity of matching corresponding points in the images, which may lead to inaccuracies. Therefore, selecting an appropriate stereo baseline is essential to achieve the desired balance between depth accuracy and computational complexity.
Stereo vision has been widely adopted in various machine vision applications across different industries. Some common uses of stereo vision include:
- Robotics: Stereo vision can help robots navigate their environment, avoid obstacles, and manipulate objects with precision
- Automated inspection: By providing accurate depth information, stereo vision can assist in identifying defects and verifying the dimensions of manufactured products
- Autonomous vehicles: Stereo vision systems can enhance the perception capabilities of self-driving cars, enabling them to detect objects and gauge distances with greater accuracy
- Virtual and augmented reality: Stereo vision can generate realistic 3D models of the environment, improving the immersion and interactivity of virtual and augmented reality experiences.
As technology advances, the applications of stereo vision in machine vision systems will continue to expand, opening up new possibilities in various industries.
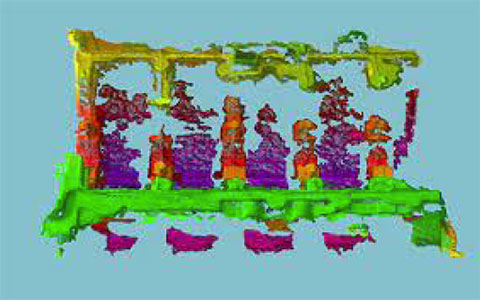 Point clouds
Point clouds
A point cloud is a collection of data points in a three-dimensional coordinate system, representing the external surface of an object or scene. In the context of 3D machine vision, point clouds are essential for extracting depth information and creating accurate 3D models of objects. By processing point clouds, machine vision systems can analyse complex geometries, detect defects, and perform measurements with high precision.
Point clouds can be generated using various techniques, such as stereo vision, structured light, and time-of-flight sensors. In stereo vision, point clouds are obtained by calculating disparities between images captured by two cameras positioned at a specific distance apart. Structured light systems project a pattern onto the object and capture the deformation of the pattern, using the captured data to generate a point cloud. Time-of-flight sensors, on the other hand, measure the time it takes for emitted light to travel to the object and back, calculating the distance to each point and generating a point cloud accordingly.
Point clouds are widely used across multiple industries for various purposes, such as:
- Quality control: Point clouds can help identify deviations from the original design, ensuring the manufactured products meet the desired specifications.
- Reverse engineering: By generating point clouds of existing objects, engineers can create accurate 3D models for redesign or replication purposes.
- Geospatial applications: Point clouds are used in surveying and mapping to create detailed representations of terrain, buildings, and infrastructure.
- Entertainment: In film and gaming, point clouds can be used to create realistic 3D models of characters, objects, and environments.
As 3D machine vision technology continues to advance, the generation and processing of point clouds will become faster and more accurate, expanding their applications and benefits across various industries.
Pixel displacement
Pixel displacement refers to the difference in the position of a particular point in an object when viewed from two different perspectives. In 3D imaging, pixel displacement is used to calculate depth information by determining the disparity between corresponding points in a stereo image pair. Accurate measurement of pixel displacement is crucial for generating precise 3D models and extracting reliable depth data from images.
Several techniques can be employed to calculate pixel displacement in 3D imaging systems. Some common methods include:
- Block matching: This technique involves searching for a small block of pixels in one image that best matches a corresponding block in the other image, calculating the displacement between the two blocks.
- Feature-based matching: In this method, distinctive features such as edges or corners are identified in both images, and the displacement is calculated by matching these features between the images.
- Optical flow: This approach estimates the displacement by analysing the apparent motion of pixels between consecutive frames in a video sequence, assuming that the motion is smooth and continuous.
The choice of technique depends on factors like image quality, computational complexity, and the desired level of accuracy.
Pixel displacement can have a significant impact on the quality and accuracy of 3D imaging systems. If pixel displacement is not accurately measured, the resulting 3D models may contain errors, leading to incorrect depth information. Moreover, factors like noise, lighting conditions, and occlusions can affect pixel displacement calculations, further impacting the quality of 3D images. Therefore, it is essential to use robust techniques for calculating pixel displacement to ensure the reliability and accuracy of 3D machine vision systems.
 Depth perception
Depth perception
Depth perception is a critical aspect of 3D machine vision, as it enables systems to determine the distance and position of objects within a scene. Accurate depth information is crucial for various applications, such as robotic manipulation, quality control, and obstacle detection. By capturing and processing depth data, 3D machine vision systems can perform tasks with higher precision and efficiency, leading to improved productivity and reduce errors in industrial processes.
Several factors can influence the depth perception capabilities of imaging systems, including:
- Camera resolution: Higher resolution cameras capture more detailed images, which can lead to more accurate depth calculations.
- Camera baseline: As discussed earlier, the stereo baseline plays a significant role in determining the depth perception capabilities of stereo vision systems.
- Image quality: Factors like noise, lighting conditions, and occlusions can affect the accuracy of depth information extracted from images.
- Algorithms and processing techniques: The choice of algorithms and techniques for calculating depth information can impact the accuracy and reliability of the resulting data.
To enhance depth perception in machine vision applications, various techniques can be employed, such as:
- Using higher resolution cameras to capture more detailed images.
- Optimising the stereo baseline to balance depth accuracy and computational complexity.
- Improving image quality through techniques like noise reduction, adaptive illumination, and HDR imaging.
- Employing advanced algorithms and processing techniques for better depth calculation, such as machine learning and AI-based methods.
By incorporating these techniques, professionals can develop 3D machine vision systems that deliver accurate and reliable depth information, enhancing the overall performance and effectiveness of their applications.
Height measurement
Height measurement is a crucial aspect of 3D imaging, as it provides valuable information about the size and shape of objects within a scene. Accurate height data is essential for various applications, including quality control, inspection, and robotic manipulation. By obtaining precise height measurements, 3D machine vision systems can ensure that manufactured products meet the desired specifications and perform tasks with increased accuracy and efficiency.
Several techniques can be employed to achieve accurate height measurement in machine vision systems, such as:
- Stereo vision: As discussed earlier, stereo vision systems can generate depth information by analysing disparities between images captured by two cameras positioned at a specific distance apart. This depth data can be used to calculate height measurements.
- Laser triangulation: This method involves projecting a laser line onto the object and capturing the deformation of the line with a camera. By analysing the deformation, the system can calculate the height profile of the object.
- Structured light: Similar to laser triangulation, structured light systems project a pattern onto the object and analyse the deformation of the pattern to generate height measurements.
Height measurement in industrial applications can be challenging due to various factors, such as:
- Complex object geometries: Objects with intricate shapes or varying surface properties can pose difficulties in obtaining accurate height measurements.
- Occlusions: Parts of the object may be hidden from the camera’s view, leading to incomplete data and inaccurate measurements.
- Environmental factors: Lighting conditions, vibrations, and temperature variations can affect the accuracy of height measurements.
To overcome these challenges, professionals can employ techniques like adaptive illumination, advanced algorithms, and robust hardware designs to improve the accuracy and reliability of height measurement in machine vision systems. By addressing these challenges, 3D imaging systems can deliver precise height data, enhancing the overall performance of industrial applications.
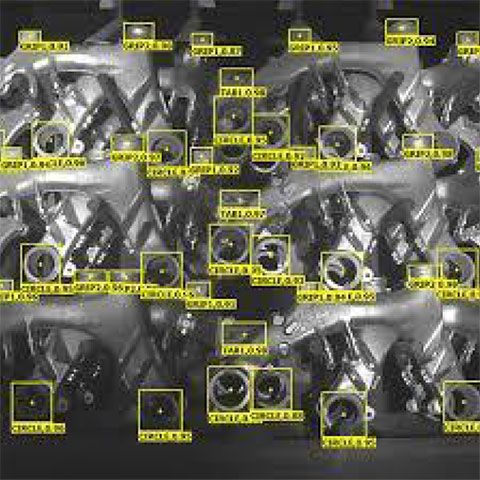
 AI in 3D machine vision
AI in 3D machine vision
Artificial intelligence (AI) has emerged as a powerful tool for enhancing the capabilities of 3D machine vision systems. AI algorithms, particularly deep learning and neural networks, can process complex datasets and extract meaningful information, leading to improved accuracy and efficiency in 3D imaging tasks. By integrating AI into machine vision systems, professionals can develop more sophisticated solutions that can better handle challenging imaging scenarios and deliver reliable results.
AI can address various challenges in 3D machine vision, including:
- Noise reduction: AI algorithms can effectively identify and remove noise from images, enhancing image quality and depth accuracy.
- Feature detection and matching: Deep learning techniques can improve the detection and matching of features in stereo images, leading to more accurate depth calculations.
- Robustness to occlusions and complex geometries: AI-powered vision systems can better handle occlusions and complex object shapes by learning to recognise and process these challenging scenarios.
By incorporating AI-based solutions, machine vision professionals can overcome common obstacles and improve the performance of their 3D imaging systems.
As AI technology continues to advance, we can expect several developments in AI-powered 3D imaging systems, such as:
- Improved depth estimation algorithms: AI models will become more efficient and accurate in estimating depth information, enhancing the overall performance of 3D imaging systems.
- Real-time processing: AI algorithms will enable faster processing of 3D data, paving the way for real-time applications in industries like robotics, autonomous vehicles, and augmented reality.
- Adaptive learning: AI-powered systems will be capable of adapting to new scenarios and environments, improving their performance and reliability in diverse applications.
The integration of AI into 3D machine vision systems will continue to drive innovation and growth in the field, offering new opportunities and solutions for professionals in the industry.
By understanding the basic principles of 3D machine vision, professionals in the machine vision and imaging components industry can better comprehend and apply the technology to their specific applications. This knowledge will enable them to develop more efficient and accurate solutions that meet the demands of various industries and applications.
As the field of 3D machine vision continues to evolve, it is crucial for professionals to stay updated with industry news and advancements. Scorpion Vision is committed to providing relevant information, expert insights, and the latest updates in the field, helping professionals stay ahead in this rapidly changing industry.
Visit the Scorpion Vision website for more information
See all stories for Scorpion Vision












