
How robots become co-workers
 More and more robots are assisting workers in factories. However, human-robot collaboration is still far from seamless. Researchers from Prof. Lorenzo Masia’s team at the Technical University of Munich (TUM) have now developed a solution that enables a factory worker wearing an exoskeleton to work closely and, above all, safely, with a robotic arm. This reduces the physical strain on workers and improves production processes.
More and more robots are assisting workers in factories. However, human-robot collaboration is still far from seamless. Researchers from Prof. Lorenzo Masia’s team at the Technical University of Munich (TUM) have now developed a solution that enables a factory worker wearing an exoskeleton to work closely and, above all, safely, with a robotic arm. This reduces the physical strain on workers and improves production processes.
When robots and humans work together in a factory, they are usually kept clearly separated – in part for safety reasons. The robot takes on a task, completes it, and hands it over to workers, who carry out the next step in the process.
“This can be physically demanding, for example, during quality inspections of components that have to be repeatedly lifted and set down,” says researcher Federico Masiero from the Chair of Intelligent Bio-Robotic Systems at the TUM School of Computation, Information and Technology.
Developed at the Munich Institute of Robotics and Machine Intelligence (TUM MIRMI), led by Prof. Lorenzo Masia, the so-called WearaCob (short for “wearable” and “collaborative”) is designed to make lifting and carrying easier for people with the help of an upper-body exoskeleton, enabling assistance from a single-arm, collaborative robot, or “cobot”.
Exoskeleton reduces upper-arm effort by up to two-thirds
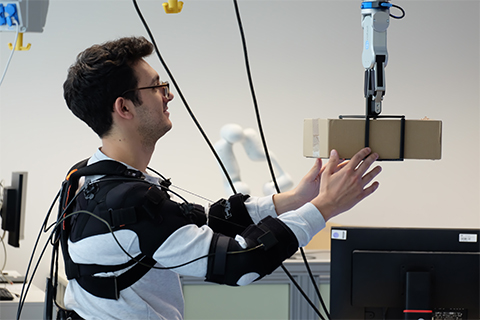 The exoskeleton is worn like a backpack, with an electric motor mounted on the back. On both sides, thin, high-strength wires run from the back over the shoulders to the front, where they are attached to elbow-pad-like supports. When the motor pulls on the wires, they take over part of the work normally performed by the biceps muscle in the upper arm. A single-arm robot assists the person wearing the exoskeleton. When the robot picks up and hands over an object, it weighs it and wirelessly transmits its weight to the exoskeleton. The cables, which in their default setting precisely compensate for the weight of the wearer’s arms, then provide additional assistance proportional to the weight of the object.
The exoskeleton is worn like a backpack, with an electric motor mounted on the back. On both sides, thin, high-strength wires run from the back over the shoulders to the front, where they are attached to elbow-pad-like supports. When the motor pulls on the wires, they take over part of the work normally performed by the biceps muscle in the upper arm. A single-arm robot assists the person wearing the exoskeleton. When the robot picks up and hands over an object, it weighs it and wirelessly transmits its weight to the exoskeleton. The cables, which in their default setting precisely compensate for the weight of the wearer’s arms, then provide additional assistance proportional to the weight of the object.
Recent studies show that this configuration can reduce muscular effort by up to 65%. “To handle asymmetrical components as well, the robot also determines their center of mass,” explains researcher Masiero. “The advantage is that one arm can receive more support than the other, making it possible to balance uneven loads.”
The shoulder exoskeleton also works well on its own, but a bit differently: The most common research method is to measure muscle activity in the upper arm and use this to determine how much additional assistance is required at that moment. This method is fairly accurate, with an error margin of only 0.5 to 1 kilogram. However, the sensors must be attached to the upper arm before each use of the exoskeleton, which is rather impractical in a factory.
Cobot programming by demonstration
 The single-arm robot is a typical seven-joint cobot. This makes it mobile and flexible, while its ability to automatically slow down as it approaches people makes it safe enough for use in a research setting.
The single-arm robot is a typical seven-joint cobot. This makes it mobile and flexible, while its ability to automatically slow down as it approaches people makes it safe enough for use in a research setting.
The combination of the exoskeleton and the robotic arm offers particular advantages for industry: “We were able to demonstrate not only that we can specifically ease the physical workload of factory workers, but also how easy it is to teach the cobot new tasks,” explains Prof. Masia. “We can program it by guiding the robotic arm. Not a single line of code is needed. That’s a huge advantage over many robots currently used in factories, which operate behind safety barriers and away from human workers.”
For the past few weeks, the research team has had a new cobot from NEURA Robotics in the laboratory, where it is set to learn additional skills in the TUM RoboGym in the near future. Not only can it handle components weighing up to 15 kg – five times more than its predecessor – but it is also equipped with a microphone, an integrated 3D camera and two other cameras. Researchers can give the latest cobot instructions directly, and it “sees” the person interacting with it in 3D as a human avatar. Special thanks go to the project partners Akina, a Swiss startup that uses computer-vision algorithms and webcams to track users’ movements, and Neura Robotics for providing state-of-the-art robotics technology.
The Munich Institute of Robotics and Machine Intelligence (TUM MIRMI) is an integrated research institute at the Technical University of Munich (TUM) focused on robotics and AI.












