
Kendrion readies robotics for ISO 10218:2025
 Robotics manufacturers, system integrators, and users face the challenge of incorporating the updated requirements of ISO 10218:2025 into future robotics projects. Kendrion’s Safety Architecture for Robotics provides an open solution featuring a SIL3/PLe certified Safety PLC paired with a robotics library for kinematic safety functions.
Robotics manufacturers, system integrators, and users face the challenge of incorporating the updated requirements of ISO 10218:2025 into future robotics projects. Kendrion’s Safety Architecture for Robotics provides an open solution featuring a SIL3/PLe certified Safety PLC paired with a robotics library for kinematic safety functions.
The safety controller combines motion, force, and zone monitoring into a single platform, enabling targeted support for future safety requirements. The architecture, which is independent of manufacturers, can be seamlessly integrated into robotics applications that utilise EtherCAT.
The updated ISO 10218:2025 standard expands the scope of robotics safety to include the secure integration into applications and robotic cell environments. In addition to position and speed, force monitoring, dynamic safety zones, and safety functions for collaborative and partially collaborative applications are receiving greater focus. The Kendrion Safety Architecture for Robotics combines a SIL3/PLe certified Safety PLC with a robotics library for kinematic safety functions.
The Safety PLC performs kinematic safety monitoring of the entire robot’s movement and processes safety-relevant data from all connected axes and drives in real time. The system tracks the position and speed of industrial robots and cobots, along with forces, torques, and customisable safety zones. Kinematic safety functions are processed with a minimum cycle time of 2 ms. With suitable FSoE drives (Fail Safe over EtherCAT), safety functions such as STO and SS1, as well as application-specific speed and zone monitoring, can be implemented.
Scalable for different robotics applications
Kendrion provides its safety architecture in the versions: Motion, Force, and Zone. The Motion version covers position and speed monitoring for traditional industrial robot applications. The Force version broadens its capabilities by including model-based and optional sensor-based monitoring of force and torque, making it particularly suitable for human-robot collaboration (HRC). The Zone version supports monitoring of up to 20 safety zones, allowing flexible protection of work areas and efficient implementation of modern HRC applications. The architecture accommodates serial robotic structures with two to nine axes, which can be either linear or rotary.
Compatible with existing robotics platforms
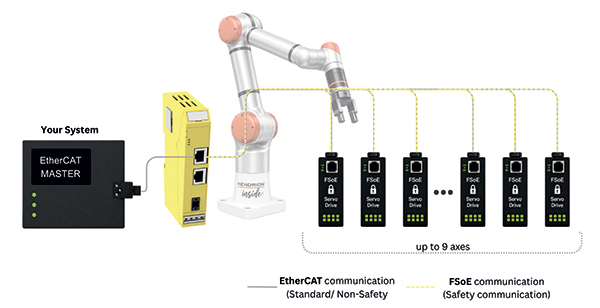
The EtherCAT master communicates directly with safe FSoE servo drives through the Kendrion Safety PLC, enabling continuous safety communication for robot systems with up to nine axes. The Kendrion safety architecture can be incorporated into existing EtherCAT-based robotics systems and works with standard FSoE drives. There is no requirement to rely on proprietary robot controllers.
 Manufacturers have the flexibility to incorporate their own functions, kinematics, and additional I/O systems. This facilitates the easy integration of laser scanners, encoders, and other safety-relevant sensors into the safety architecture. The open system architecture creates a high degree of flexibility for future robotics platforms and supports the implementation of new safety requirements.
Manufacturers have the flexibility to incorporate their own functions, kinematics, and additional I/O systems. This facilitates the easy integration of laser scanners, encoders, and other safety-relevant sensors into the safety architecture. The open system architecture creates a high degree of flexibility for future robotics platforms and supports the implementation of new safety requirements.












